La expresión electrónica de potencia se utiliza para diferenciar el tipo de aplicación que se le da a dispositivos electrónicos, en este caso para transformar y controlar voltajes y corrientes de niveles significativos.
Se diferencia así este tipo de aplicación de otras de la electrónica denominadas de baja potencia o también de corrientes débiles
En este tipo de aplicación se reencuentran la electricidad y la electrónica, pues se utiliza el control que permiten los circuitos electrónicos para controlar la conducción (encendido y apagado) de semiconductores de potencia para el manejo de corrientes y voltajes en aplicaciones de potencia.
Esto al conformar equipos denominados convertidores estáticos de potencia.
De esta manera, la electrónica de potencia permite adaptar y transformar la energía eléctrica para distintos fines tales como alimentar controladamente otros equipos, transformar la energía eléctrica de continua a alterna o viceversa, y controlar la velocidad y el funcionamiento de máquinas eléctricas, etc. mediante el empleo de dispositivos electrónicos, principalmente semiconductores.
Esto incluye tanto aplicaciones en sistemas de control, sistemas de compensación de factor de potencia y/o de armónicos como para suministro eléctrico a consumos industriales o incluso la interconexión de sistemas eléctricos de potencia de distinta frecuencia.
El principal objetivo de esta disciplina es el manejo y transformación de la energía de una forma eficiente, por lo que se evitan utilizar elementos resistivos, potenciales generadores de pérdidas por efecto Joule.
Los principales dispositivos utilizados por tanto son bobinas y condensadores, así como semiconductores trabajando en modo corte/saturación (on/off, encendido y apagado).
Convertidores de la energía eléctrica.
Conversión de potencia es el proceso de convertir una forma de energía en otra, esto puede incluir procesos electromecánicos o electroquímicos.
Dichos dispositivos son empleados en equipos que se denominan convertidores estáticos de potencia, clasificados en:
Rectificadores: convierten corriente alterna en corriente continua
En la actualidad esta disciplina está cobrando cada vez más importancia debido principalmente a la elevada eficiencia de los convertidores electrónicos en comparación a los métodos tradicionales, y su mayor versatilidad.
Un paso imprescindible para que se produjera esta revolución fue el desarrollo de dispositivos capaces de manejar las elevadas potencias necesarias en tareas de distribución eléctrica o manejo de potentes motores.
Aplicaciones.
Las principales aplicaciones de los convertidores electrónicos de potencia son las siguientes:
Fuentes de alimentación: En la actualidad han cobrado gran importancia un subtipo de fuentes de alimentación electrónicas, denominadas fuentes de alimentación conmutadas. Estas fuentes se caracterizan por su elevado rendimiento y reducción de volumen necesario.
El ejemplo más claro de aplicación se encuentra en la fuente de alimentación de los ordenadores.
Control de motores eléctricos: La utilización de convertidores electrónicos permite controlar parámetros tales como la posición, velocidad o par suministrado por un motor.
Este tipo de control se utiliza en la actualidad en los sistemas de aire acondicionado. Esta técnica, denominada comercialmente como "inverter" sustituye el antiguo control encendido/apagado por una regulación de velocidad que permite ahorrar energía.
Asimismo, se ha utilizado ampliamente en tracción ferroviaria, principalmente en vehículos aptos para corriente continua (C.C.) durante las décadas de los años 70 y 80, ya que permite ajustar el consumo de energía a las necesidades reales del motor de tracción, en contraposición con el consumo que tenían los vehículos controlados por resistencias de arranque y frenado.
Actualmente el sistema chopper sigue siendo válido, pero ya no se emplea en la fabricación de nuevos vehículos, puesto que actualmente se utilizan equipos basados en el motor trifásico, mucho más potente y fiable que el motor de colector.
Calentamiento por inducción: Consiste en el calentamiento de un material conductor a través del campo generado por un inductor. La alimentación del inductor se realiza a alta frecuencia, generalmente en el rango de los kHz, de manera que se hacen necesarios convertidores electrónicos de frecuencia. La aplicación más vistosa se encuentra en las cocinas de inducción actuales.
Otras: Como se ha comentado anteriormente son innumerables las aplicaciones de la electrónica de potencia. Además de las ya comentadas destacan: sistemas de alimentación ininterrumpida, sistemas de control del factor de potencia, balastos electrónicos para iluminación a alta frecuencia, interfase entre fuentes de energía renovables y la red eléctrica, etc.
Las líneas de investigación actuales buscan la integración de dispositivos de potencia y control en un único chip, reduciendo costes y multiplicando sus potenciales aplicaciones. No obstante existen dificultades a salvar como el aislamiento entre zonas trabajando a altas tensiones y circuitería de control, así como la disipación de la potencia perdida.
Se preguntaran maquinas virtuales en automatismos industriales y electricidad para que?
La razón de utilizar maquinas virtuales en los automatismos industriales es por que a la hora de probar programas de autómatas, diseño de planos, neumática, hidráulica,etc. De los nombrados hay muchas marcas y modelos como así también lo hay en software y depende de la ubicación geográfica algunos son mas comunes que otros.
Por eso es bueno contar con maquinas virtuales para la prueba de los mismos.
En este apartado de este blog hablare de ellos y algunas formas de implementacion.
Virtual box es una plataforma donde se creara de forma virtual una maquina es decir dentro de nuestra maquina física podremos crear otra que sera un programa que correrá como si fuera una maquina mas a la cual le instalaremos el sistema operativo que deseemos Windows en cualquiera de sus versiones o Ubuntu de Linux este es un software libre mas fácil de conseguir.
Yo particularmente lo que mas e probado son sistemas operativos de distintos fabricantes y una variedad importantes de software de distintos tipo por ejemplo sistemas CAD de diseño de planos. programación de PLC de gama baja, media y alta; PLR de la linea Zelio y Logo de Siemens.
Una vez creada las maquinas virtuales lo que hacemos ahora es crear la red asignando de forma manual o automática las direcciones IP de cada Host y el Servidor.
En caso de querer aprender mas sobre Dominio y creación de Usuarios les recomiendo utilizar un Software de Cisco , su nombre es Cisco Packet Tracer Student.
Con este programa podemos diseñar, armar y probar de forma virtual una red de Host que no necesariamente deberán ser computadoras si no que pueden ser todos los dispositivos que tengan puerto de coneccion a Internet.
Bueno con lo expuesto hasta aquí ya sabemos un poco mas de redes de computadoras las cuales las podremos implementar para su uso industrial, domésticos, oficinas,etc.
Un cuadro eléctrico es una combinación de varios dispositivos de protección y maniobra, agrupados en una o más cajas adyacentes (columnas).
En un cuadro es posible distinguir las siguientes partes: una caja, denominada envolvente conforme a las normas (y cuya función es el soporte y la protección mecánica de los componentes que alberga) y el equipamiento eléctrico, formado por los aparatos, las conexiones internas y los terminales de entrada y salida para la conexión a la instalación.
Como todos los componentes de un sistema eléctrico, los cuadros también deben cumplir las normas
correspondientes.
Variedad de cuadros eléctricos.
En lo referido a las normas, se ha producido un cambio con la sustitución de la antigua norma IEC 60439-1 por las normas IEC 61439-1 e IEC 61439-2. Estas normas son aplicables a todos los cuadros de distribución y control de baja tensión (aquellos en los que la tensión nominal no supera los 1000 V para CA o los 1500 V para CC).
En este documento, el término "cuadro" se utiliza para hacer referencia a un conjunto de equipos de protección y maniobra de baja tensión.
Este cuaderno de aplicaciones técnicas tiene como fin:
1) describir las principales innovaciones y cambios introducidos en las nuevas normas en lo relativo a
estructura, definiciones y contenido (por ejemplo, métodos de verificación de cuadros y condiciones
de aplicación correspondientes), prestando especial atención a la verificación del rendimiento en cuanto a: límites de sobre temperatura, resistencia a cortocircuitos y propiedades dieléctricas;
2) proporcionar un documento que incluya información útil para la construcción y certificación de cuadros de baja tensión conforme a las normas IEC 61439.
Este documento está dividido en siete apartados principales;
- introducción y descripción de las nuevas normas IEC 61439;
- definición de las características eléctricas nominales, de los grados IP e IK y de las formas de segregación interna de un cuadro;
- requisitos normativos en cuanto a: sobretemperatura, resistencia a cortocircuitos y propiedades dieléctricas (distancias de aislamiento);
- requisitos para la protección contra el contacto directo e indirecto;
- instrucciones para la construcción, manipulación, transporte e instalación definitiva de los cuadros;
- propiedades y rendimiento (verificaciones de diseño) de los cuadros y una guía para llevar a cabo
verificaciones particulares (certificación del cuadro);
- un ejemplo de selección de productos (interruptores automáticos, conductores, sistema de distribución, embarrados y estructura metálica) para la construcción de cuadros ArTu.
En otro apartado de este blog explique y muestro CadeSimu que es un software de prueba de circuitos automáticos y realiza la confección también de planos no es del todo completo pero a la hora de crear un automatismo es de mucha utilidad y practico.
En lo que se refiere a diseño de planos la variedad de software de diseño de planos es muy amplia por eso a la hora de comenzar, los programas mostrados aquí son una buena opción para iniciarnos en el mundo de los diseños y proyectos industriales, claro que si queremos enlazarlos con nuestros programas de plc o diseños de neumática e hidráulica les recomiendo Eplan o otra opción podría ser también Aucotec el Cad.
Los PIC son una familia de microcontroladores tipo RISC fabricados por Microchip Technology Inc. y derivados del PIC 1650, originalmente desarrollado por la división de microelectrónica de General Instrument.
PIC 1650
El nombre actual no es un acrónimo. En realidad, el nombre completo es PICmicro, aunque generalmente se utiliza como Peripheral Interface Controller(controlador de interfaz periférico).
El PIC original se diseñó para ser usado con la nueva CPU de 16 bits CP16000. Siendo en general una buena CPU, ésta tenía malas prestaciones de entrada y salida, y el PIC de 8 bits se desarrolló en 1975 para mejorar el rendimiento del sistema quitando peso de entrada/salida a la CPU.
El PIC utilizaba micro código simple almacenado en ROM para realizar estas tareas; y aunque el término no se usaba por aquel entonces, se trata de un diseño RISC que ejecuta una instrucción cada 4 ciclos del oscilador.
En 1985 la división de microelectrónica de General Instrument se separa como compañía independiente que es incorporada como filial (el 14 de diciembre de 1987 cambia el nombre a Microchip Technology y en 1989 es adquirida por un grupo de inversores) y el nuevo propietario canceló casi todos los desarrollos, que para esas fechas la mayoría estaban obsoletos. El PIC, sin embargo, se mejoró con EPROM para conseguir un controlador de canal programable. Hoy en día multitud de PIC vienen con varios periféricos incluidos (módulos de comunicación serie, UART, núcleos de control de motores, etc.) y con memoria de programa desde 512 a 32 000 palabras (una palabra corresponde a una instrucción en lenguaje ensamblador, y puede ser de 12, 14, 16 o 32 bits, dependiendo de la familia específica de PICmicro).
El PIC usa un juego de instrucciones, cuyo número puede variar desde 35 para PIC de gama baja a 70 para los de gama alta. Las instrucciones se clasifican entre las que realizan operaciones entre el acumulador y una constante, entre el acumulador y una posición de memoria, instrucciones de condicionamiento y de salto/retorno, implementación de interrupciones y una para pasar a modo de bajo consumo llamada sleep.
Microchip proporciona un entorno de desarrollo freeware llamado MPLAB que incluye un simulador software y un ensamblador. Otras empresas desarrollan compiladores C y BASIC. Microchip también vende compiladores para los PIC de gama alta ("C18" para la serie F18 y "C30" para los dsPIC) y se puede descargar una edición para estudiantes del C18 que inhabilita algunas opciones después de un tiempo de evaluación.
Para el lenguaje de programación Pascal existe un compilador de código abierto, JAL, lo mismo que PicForth para el lenguaje Forth. GPUTILS es una colección de herramientas distribuidas bajo licencia GPL que incluye ensamblador y enlazador, y funciona en Linux, MacOS y Microsoft Windows. GPSIM es otra herramienta libre que permite simular diversos dispositivos hardware conectados al PIC.
Uno de los más modernos y completos compiladores para lenguaje C es [mikroC], que es un ambiente de desarrollo con editor de texto, bibliotecas con múltiples funciones para todos los módulos y herramientas incorporadas para facilitar enormemente el proceso de programación.
Arquitectura central.
La arquitectura del PIC es sumamente minimalista. Está caracterizada por las siguientes prestaciones:
Área de código y de datos separadas (Arquitectura Harvard).
Un reducido número de instrucciones de longitud fija.
Implementa segmentación de tal modo que la mayoría de instrucciones duran 1 tiempo de instrucción (o 4 tiempos de reloj). Pueden haber instrucciones de dos tiempos de instrucción (saltos, llamadas y retornos de subrutinas y otras) o inclusive con más tiempo de instrucción en PIC de gama alta. Esto implica que el rendimiento real de instrucciones por segundo del procesador es de al menos 1/4 de la frecuencia del oscilador.
Un solo acumulador (W), cuyo uso (como operador de origen) es implícito (no está especificado en la instrucción).Todas las posiciones de la RAM funcionan como registros de origen y/o de destino de operaciones matemáticas y otras funciones.
Una pila de hardware para almacenar instrucciones de regreso de funciones.
Una relativamente pequeña cantidad de espacio de datos direccionable (típicamente, 256 bytes), extensible a través de manipulación de bancos de memoria.
El espacio de datos está relacionado con el CPU, puertos, y los registros de los periféricos.
El contador de programa está también relacionado dentro del espacio de datos, y es posible escribir en él (permitiendo saltos indirectos).
A diferencia de la mayoría de otros CPU, no hay distinción entre los espacios de memoria y los espacios de registros, ya que la RAM cumple ambas funciones, y esta es normalmente referida como "archivo de registros" o simplemente, registros.
Los microcontroladores PIC tienen una serie de registros que funcionan como una RAM de propósito general. Los registros de propósito específico para los recursos de hardware disponibles dentro del propio chip también están direccionados en la RAM. La direccionabilidad de la memoria varía dependiendo de la línea de dispositivos, y todos los dispositivos PIC tienen algún tipo de mecanismo de manipulación de bancos de memoria que pueden ser usados para acceder memoria externa o adicional. Las series más recientes de dispositivos disponen de funciones que pueden cubrir todo el espacio direccionable, independientemente del banco de memoria seleccionado. En los dispositivos anteriores, esto debía lograrse mediante el uso del acumulador.
Para implementar direccionamiento indirecto, se usa un registro de "selección de registro de archivo" (FSR) y uno de "registro indirecto" (INDF): Un número de registro es escrito en el FSR, haciendo que las lecturas o escrituras al INDF serán realmente hacia o desde el registro apuntado por el FSR. Los dispositivos más recientes extienden este concepto con post y preincrementos/decrementos para mayor eficiencia al acceder secuencialmente a la información almacenada. Esto permite que se pueda tratar al FSR como un puntero de pila.
La memoria de datos externa no es directamente direccionable excepto en algunos microcontroladores PIC 18 de gran cantidad de pines.
Programación del PIC.
Para transferir el código de un ordenador al PIC normalmente se usa un dispositivo llamado programador. La mayoría de PIC que Microchip distribuye hoy en día incorporan ICSP (In Circuit Serial Programming, programación serie incorporada) o LVP (Low Voltage Programming, programación a bajo voltaje), lo que permite programar el PIC directamente en el circuito destino. Para la ICSP se usan los pines RB6 y RB7 (En algunos modelos pueden usarse otros pines como el GP0 y GP1 o el RA0 y RA1) como reloj y datos y el MCLR para activar el modo programación aplicando un voltaje de 13 voltios.
Existen muchos programadores de PIC, desde los más simples que dejan al software los detalles de comunicaciones, a los más complejos, que pueden verificar el dispositivo a diversas tensiones de alimentación e implementan en hardware casi todas las funcionalidades.
Muchos de estos programadores complejos incluyen ellos mismos PIC preprogramados como interfaz para enviar las órdenes al PIC que se desea programar. Uno de los programadores más simples es el TE20, que utiliza la línea TX del puerto RS-232 como alimentación y las líneas DTR y CTS para mandar o recibir datos cuando el microcontrolador está en modo programación. El software de programación puede ser el ICprog, muy común entre la gente que utiliza este tipo de microcontroladores. Entornos de programación basados en intérpretes BASIC ponen al alcance de cualquiera proyectos que parecieran ser ambiciosos.
Se pueden obtener directamente de Microchip muchos programadores/depuradores (octubre de 2005):
Una buena recopilación de herramientas de desarrollo para PIC puede encontrarse Aquí. (Mayo de 2009).
Los PIC actuales vienen con una amplia gama de mejoras hardware incorporadas:
Núcleos de CPU de 8/16 bits con Arquitectura Harvard modificada
Memoria Flash y ROM disponible desde 256 bytes a 256 kilobytes
Puertos de entrada/salida (típicamente 0 a 5.5 voltios)
Temporizadores de 8/16/32 bits
Tecnología Nanowatt para modos de control de energía
Periféricos serie síncronos y asíncronos: USART, AUSART, EUSART
Conversores analógico/digital de 8-10-12 bits
Comparadores de tensión
Módulos de captura y comparación PWM
Controladores LCD
Periférico MSSP para comunicaciones I²C, SPI, y I²S
Memoria EEPROM interna con duración de hasta un millón de ciclos de lectura/escritura
Periféricos de control de motores
Soporte de interfaz USB
Soporte de controlador Ethernet
Soporte de controlador CAN
Soporte de controlador LIN
Soporte de controlador Irda
Variaciones del PIC.
PIC modernos.
Los viejos PIC con memoria PROM o EPROM se están renovando gradualmente por chips con memoria Flash. Así mismo, el juego de instrucciones original de 12 bits del PIC1650 y sus descendientes directos ha sido suplantado por juegos de instrucciones de 14 y 16 bits. Microchip todavía vende versiones PROM y EPROM de la mayoría de los PIC para soporte de aplicaciones antiguas o grandes pedidos.
Se pueden considerar tres grandes gamas de MCU PIC en la actualidad: Los básicos (Line base), los de medio rango (Mid Range) y los de alto desempeño (high performance).
Los PIC18 son considerandos de alto desempeño y tienen entre sus miembros a PIC con módulos de comunicación y protocolos avanzados (USB, Ethernet, Zigbee por ejemplo).
Clones del PIC.
Por todos lados surgen compañías que ofrecen versiones del PIC más baratas o mejoradas. La mayoría suelen desaparecer rápidamente. Una de ellas que va perdurando es Ubicom (antiguamente Scenix) que vende clones del PIC que funcionan mucho más rápido que el original. Open Cores tiene un núcleo del PIC16F84 escrito en Verilog.
PIC inalámbricos.
El microcontrolador rfPIC integra todas las prestaciones del PICmicro de Microchip con la capacidad de comunicación inalámbrica UHF para aplicaciones RF de baja potencia. Estos dispositivos ofrecen un diseño muy comprimido para ajustarse a los cada vez más demandados requerimientos de miniaturización en aparatos electrónicos. Aun así, no parecen tener mucha salida en el mercado.
PIC para procesado de señal (dsPIC).
Los dsPIC son el penúltimo lanzamiento de Microchip, comenzando a producirlos a gran escala a finales de 2004. Son los primeros PIC con bus de datos inherente de 16 bits. Incorporan todas las posibilidades de los anteriores PIC y añaden varias operaciones de DSP implementadas en hardware, como multiplicación con suma de acumulador (multiply-accumulate, o MAC), barrel shifting, bit reversión o multiplicación 16x16 bits.
PIC de 32 bits (PIC32).
Microchip Technology lanzó en noviembre de 2007 los nuevos microcontroladores de 32 bits con una velocidad de procesamiento de hasta 1.6 DMIPS/MHz con capacidad HOST USB. Sus frecuencias de reloj pueden alcanzar los 80 MHz a partir de cuarzos estándares de 4 a 5MHz gracias a un PLL interno. Funcionan a 3.3 V en sus puertos de entrada y salida, aunque el fabricante indica que salvo en los pines con función analógica, en la mayoría se toleran tensiones de hasta 5V. Disponen de una arquitectura optimizada con alto grado de paralelismo y núcleo de tipo M4K y una elevada capacidad de memoria RAM y FLASH ROM. Todo ello hace que estos MCUs permiten un elevado procesamiento de información.
PIC más comúnmente usados
PIC12C508/509 (Encapsulamiento reducido de 8 pines, oscilador interno, popular en pequeños diseños como el iPod remote).
PIC12F629/675
PIC16F84 (Considerado obsoleto, pero imposible de descartar y muy popular)
PIC16F84A (Actualización del anterior, la A indica que cuenta con módulos de comparación A/D, algunas versiones funcionan a 20 MHz, compatible 1:1)
PIC16F628A/648A (Opciones típicas para migrar o actualizar desde diseños antiguos hechos con el
Poseen módulos de comparación A/D, Capture & Compare CCP (PWM), comunicación en serie USART y oscilador interno, entre otras mejoras)
PIC16F88 (Nuevo sustituto del PIC16F84A y superior al PIC16F648A con más memoria, oscilador interno, USART, SSP, comparador y convertidor A/D. Muy popular).
PIC16F87X/87XA ("Hermanos mayores" del PIC16F84/84A, con cantidad de mejoras incluidas en hardware. Bastante común en proyectos de aficionados).
PIC16F886/887 (Nuevo sustituto del 16F876A y 16F877A con la diferencia que ahora ya incluye oscilador interno, considerados los más cercanos a la familia 18F).
dsPIC30F3011 (Ideales para control electrónico de motores eléctricos de inducción, control sobre audio, etc).
PIC32 (Nueva gama de PIC de 32 bits, los más modernos son compatibles con USB 2.0).
PIC en Internet.
Se puede encontrar extensa información y documentación sobre PIC en Internet, principalmente por dos motivos: el primero, porque han sido muy usados para romper los sistemas de seguridad de varios productos de consumo masivo (televisión paga, PlayStation, etc), lo que atrae la atención de los cracker; y segundo, porque el PIC16C84 fue uno de los primeros microcontroladores fácilmente reprogramables para aficionados.
Hay muchos foros y listas de correo dedicados al PIC, en los que un usuario puede proponer sus dudas y recibir respuestas.
Monitorización y control vía Internet.
Con estos se pueden desarrollar sistemas sistemas SCADA, para adquirir y enviar datos al puerto serial de un computador utilizando, por ejemplo, transmisión UART y el protocolo RS-232, o implementando el protocolo TCP/IP directamente para construir un sistema completamente embebido.
PICAXE es una familia de microcontroladores basada en PIC.
Los PICAXE son esencialmente PICs, con firmware preprogramado que habilita el arranque de código directamente de un PC, simplificando el desarrollo de sistemas embebidos al aficionado.
Picaxe 20M2.
Hardware.
Actualmente hay siete variantes de PICAXE, variando de 8 a 40 pines y entre encapsulados DIP y SMD.
DIP SMD
Vienen preprogramados con un intérprete de BASIC similar al BASIC Stamp, pero usando EEPROM, por consecuencia reduciendo costos. Esto también permite hacer descargas de programa con una conexión serial simple, eliminando la necesidad de un programador PIC.
Los PICAXE se programan usando cable serial RS-232 o USB, conectado entre el computador y el circuito de descarga, el cual usa típicamente un jack 3.5mm y dos resistencias. Fuente wikipedia
SISTEMA DE PROGRAMACIÓN DE MICROCONTROLADOR
El “PICAXE” es un sistema de microcontroladores fáciles de programar que explota las características únicas de la nueva generación de microcontroladores de bajo costo con memoria FLASH. Estos microcontroladores pueden ser programados una y otra vez sin la necesidad de un costoso programador.
El poder del sistema PICAXE radica en su sencillez. No necesita de ningún programador, borrador o complejo sistema electrónico – el microcontrolador es programado (con un simple programa en BASIC o un diagrama de flujo) mediante una conexión de tres alambres conectada al puerto serie (USB) del ordenador. El circuito operacional PICAXE utiliza únicamente tres componentes y puede ser ensamblado fácilmente en un tablero experimental para componentes electrónicos, en una placa corriente o en una placa PCB.
El microcontrolador PICAXE-28 provee 22 pines de entrada/salida – 8 salidas digitales, 8 entradas, 4 analógicas y 2 pines de interfase en serie.
• bajo costo, circuito de fácil construcción
• 8 salidas y 5 entradas y 4 analógicas
• rápida operación de descarga mediante el cable serie
• Software “Editor de Programación” gratuito y de fácil uso
• lenguaje BASIC simple y fácil de aprender
• manuales gratuitos y foro de apoyo en línea
• también puede programarse utilizando Organigramas
El paquete de inicio incluye los siguientes elementos:
• tablero estándar de interfase
• cable de descarga
• CDROM con programas y manuales
• chip de microcontrolador PICAXE-28A
Todo lo mencionado sobre el paquete de inicio lo podes descargar desde la pagina oficial del fabricante PICAXE.
O si lo que deseas es conseguirlo lo que debes hacer es una cuenta, lo podrás comprar directo al fabricante en su sección de PICAXESTORE y pagarlo por los métodos de pagos online como por ejemplo PAYPAL.
Primer Programa
La verdad que para hacer un primer programa es bastante sencillo y cargarlo en el PICAXE es también una tarea fácil de llevar a cabo solo se requieren 2 resistencias un protoboard, un conector serial DB9 y el software de PICAXE.
Encendido y apagado de uno de los terminales del PICAXE, lo que hace el programa es encender y apagar un pins configurado como salida ya que los mismo pueden ser entrada o salida para esto debemos mirar el datasheet del componente.
Desde la pagina del fabricante hay una sección donde podes ver y comprar los kits de proyectos para armar o también podemos utilizar el kits modificarlo y hacer algo a nuestro gusto.
Las placas para programarlos pueden ser desde un simple protoboard o incluso realizarlas para algunos modelos de PICAXE como para todos los que se encuentran en el mercado, o como la mostrada mas abajo.
También desde la pagina oficial tenemos el PICAXESTORE donde encontraremos varios modelos de programadores y podremos elegir uno que se ajuste a nuestras necesidades.
Otra opción interesante es probar los proyectos de forma virtual con el software PICAXE VSM
Aquí se prueba un micrófono conectado a una entrada analógica, de las cuales he tomado 4 valores desde su estado normal. esos valores lo he asociado a 3 salidas 3 patas de un led multicolor mediante el picaxe 28x2.
TRASMISIÓN NO BALANCEADA (SINGLE ENDED, RS232) VS. TRASMISIÓN BALANCEADA (DIFERENCIAL, RS422/485)
Cuando se trasmite información digital en forma serial a través de cable, en modo punto a punto o multipunto, en donde existe una computadora central conectada con varias Unidades Terminales Remotas (UTR), es posible usar dos modos de trasmisión: la trasmisión no balanceada o "single ended" y la trasmisión balanceada o diferencial.
Ambos modos de operación han sido estandarizados por la Electronics Industry Association (EIA) en las normas EIA-RS232, EIA-RS422 y EIA-RS485.
RS232, TRASMISION BALANCEADA, SINGLE ENDED
Esta norma fue diseñada para comunicación punto a punto, en donde se tiene una computadora (en la norma RS232 se le denomina DTE, Data Terminal Equipment) que se encuentra trasmitiendo hacia un equipo esclavo (en la norma conocido como DCE, Data Communications Equipment) ubicado a distancias no mayores a 15 metros (aunque en la práctica alcanza distancias de hasta 50 metros) y a una velocidad máxima de 19,200 bps. Este tipo de trasmisión se le conoce como "single ended" porque usa en el cable un solo retorno (GND). Es un modo de trasmisión muy simple, pero también vulnerable al ruido aditivo en la línea y por esa razón es empleada para comunicación a distancias cortas.
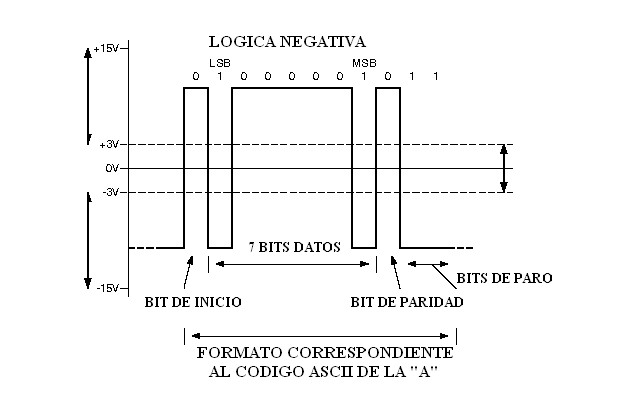
El formato de trasmisión de datos en las señales TX y RX del estándar RS232, se muestra en la figura de abajo. Se trata de una señal serial bipolar, normalmente entre +10 y -10 volts, con formato asíncrono. En el ejemplo se trasmite el código ASCII de la "A" (01000001). Observe que sigue una lógica negativa, con un nivel alto para el valor 0 lógico y un nivel bajo para el 1. El circuito integrado estándar para generar esta señal es el MAX232N.
En la línea de tiempo, que va de izquierda a derecha, el bit menos significativo LSB se trasmite primero y el bit más significativo MSB, al último.
Originalmente la norma RS232 fue diseñada para comunicar a una computadora (DTE) con su módem para línea telefónica (DCE), pero actualmente se usa también para comunicación entre dos computadoras, o bien una computadora con un dispositivo periférico.
El puerto serial DB25-RS232, en su forma original estándar, contaba con 25 señales, se usó desde los años 60, y fue diseñado para enlazar la computadora y módems externos de baja velocidad para líneas telefónicas (actualmente casi en obsolescencia). Posteriormente, el conector DB25 fue reemplazado por el DB9.
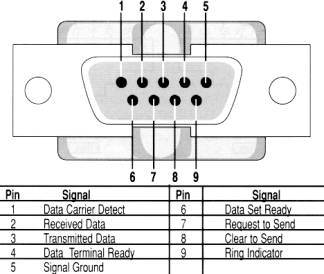
Para la conexión se utiliza un cable con conectores DB9, con nueve señales, como el mostrado en las figuras. Adicionalmente a la señales de datos trasmitidos y recibidos TX, RX, la norma original RS232 incluye definiciones para señales de control (en inglés "handshake signals") que se usan para varias funciones auxiliares en el protocolo de envío y recepción de datos, así como para el diagnóstico de fallas.
Actualmente, el estándar se ha simplificado a las señales de trasmisión TX, recepción RX y tierra GND, dejando sin utilizarse el resto de las señales. La aplicación más común es la comunicación entre una computadora y una terminal remota.
En seguida se muestra una foto del conector DB9 y la asignación de señales.
En la actualidad las computadoras personales ya no poseen conectores DB9 en sus salidas, pero el puerto serial RS232 sigue siendo muy utilizado en aplicaciones industriales ó para la conexión de la PC con diferentes dispositivos periféricos, por ejemplo módems GSM, lectores RFID, lectores de códigos de barras, etc. Para tal fin se utilizan los cables de interfaz USB-Serial.
El estándar serial DB9 también es usado en la actualidad para conectar sistemas microcontroladores con los siguientes dispositivos:
Cuando se requieren mayores distancias y velocidades de trasmisión, entonces deben de emplearse las normas RS422 y RS485. Además, estas normas permiten también la trasmisión multipunto, es decir una computadora central conectada con varias UTR. Dado que la computadora central típicamente tiene como salida la interfaz RS232, se hace necesaria la conexión de un módulo convertidor RS232 a RS422/485, para implementar una red.
La trasmisión diferencial permite velocidades de hasta 10 Mbps, sobre distancias de hasta 1.3 kms. Se usan dos señales para trasmitir y dos para recibir, además de la tierra, la cual es normalmente conectada al blindaje del cable. En cada par, viajan la señal de trasmisión y su complemento. En el receptor, la señal original se obtiene restando una de la otra. Esta técnica reduce grandemente el ruido generado en la línea, ya que éste se induce por igual en ambas líneas del par y es al final cancelado. Este tipo de trasmisión debe de hacerse siempre sobre cable del tipo "par trensado" (twisted pairs).
RS422
RS422 usa 4 señales y puede emplearse para comunicación punto a punto o multipunto. En su aplicación más simple, una computadora central se comunica con una UTR empleando un protocolo master-slave, full dúplex. La electrónica del convertidor RS232-RS422 es muy simple porque solo se emplean buffers transmisores receptores del tipo 75176. Una conexión típica se muestra abajo. La computadora central se comunica con un convertidor (K422) usando 5 de las señales de la norma RS232. El convertidor se conecta al dispositivo remoto 422 usando 4 señales y la tierra.
En algunas aplicaciones, la norma RS422 puede emplearse en redes "mulipunto", es decir, una computadora central comunicándose con varias UTR. En este caso, pueden usarse dos tipos de protocolos de comunicaciones:
1. El llamado protocolo "interrogación-respuesta" o "polling" en el cual la computadora envía mensajes que incluyen la dirección de la UTR a la cual se envía el mensaje y solamente la UTR que reconoce su dirección responderá.
2. El protocolo del tipo "reporte espontáneo" en al cual, la UTR inicia la comunicación y envía su bloque de datos, únicamente cuando ocurra un evento. Por ejemplo, en el caso de un sistema de control de acceso, el evento ocurre cuando se efectúa el ingreso de una persona identificada.
En el modo multipunto, todas las UTR deben de poseer drivers del tipo "tristate" en sus líneas RXA y RXB que permitan su virtual desconexión de las líneas cuando no se encuentran trasmitiendo, para permitir el libre flujo de la información sin interferencias.
RS485
La diferencia principal entre RS422 y RS485 es el número de señales usadas en el cable de trasmisión. RS422 usa 4 señales y su tierra, RS485 usa solo 2 señales y su tierra. RS485 requiere de un protocolo "half dúplex" para operar, dado que las mismas líneas son usadas tanto para trasmisión como recepción.
Todos los dispositivos RS485 poseen drivers "tristate" que permiten a las UTR desconectarse de la línea una vez que trasmitieron su información. Normalmente, para este fin se usa un circuito temporizador automático habilitado por el flanco ascendente de la señal de trasmisión. El temporizador habilita el circuito transmisor durante el tiempo que dura el mensaje y lo deshabilita al terminar éste.
Entre las aplicaciones típicas de la norma RS485, se encuentran los sistemas de control de acceso, los sistemas distribuidos de control industrial y los sistemas de seguridad casera. En todos estos casos, varias UTR reportan su información hacia una computadora central o bien reciben comandos de la misma.